Radar
Il radar (radio detecting and ranging) è
sicuramente lapparato ricetrasmittente piu sofisticato ed evoluto, su
cui più di ogni altro si è investito con grandi stanziamenti
economici e limpiego delle migliori risorse umane.
 Isle of Man Airport
Isle of Man Airport
Si è già ripetutamente trattato di radar su R.R. con eccellenti articoli soprattutto in termini di applicazioni sperimentali, componentistica e richiami storici. Parlando dellargomento, anche via radio, mi è parso di capire che per qualcuno, pur interessato, è stato difficile comprenderne completamente il contenuto per carenza di cognizioni teoriche e terminologia.
La mia intenzione è pertanto quella di fornire una panoramica indirizzata a far conoscere i fondamenti e a suggerire spunti per approfondire questo affascinante argomento.
La bibliografia tecnica definisce il radar come
un sensore elettromagnetico usato per la ricerca, la localizzazione e lidentificazione
di oggetti di vario tipo a considerevoli distanze.

In realtà si tratta di un vero senso in più che ci da la possibilità di percepire un oggetto quando i nostri sensi naturali non lo possono avvertire. Il radar può non solo determinare la presenza, la posizione e la velocità di tale oggetto ma può talvolta anche ottenere la sua dimensione e la forma.
 Imaging
Imaging
Quello che distingue il radar da sensori ottici
e infrarossi è la sua abilità a ricercare e determinare con
precisione la distanza di oggetti in ogni condizione ambientale, di luce
e meteo.
Esso opera mediante la trasmissione di energia elettromagnetica verso gli oggetti, comunemente indicati come "bersagli" (targets) e osservando leco che ritorna da essi. I bersagli possono essere missili, aerei, navi, case, veicoli e corpi spaziali, automobili, uccelli, insetti, uragani o gocce dacqua. Nella terminologia comune un bersaglio viene inteso come una entità che si insegue con lintento di colpire, nella radaristica il significato è più generale poichè il target è il soggetto che viene ricercato, seguito ed indagato.
Il radar è un sensore attivo in quanto esso ha una sua propria sorgente di energia per "illuminare"i bersagli. Esso opera tipicamente nella regione delle microonde dello spettro elettromagnetico, su frequenze che si estendono da 400 MHz a 40 GHz (nota1). E stato anche usato su frequenze più basse per applicazioni a più lunga distanza (HF)
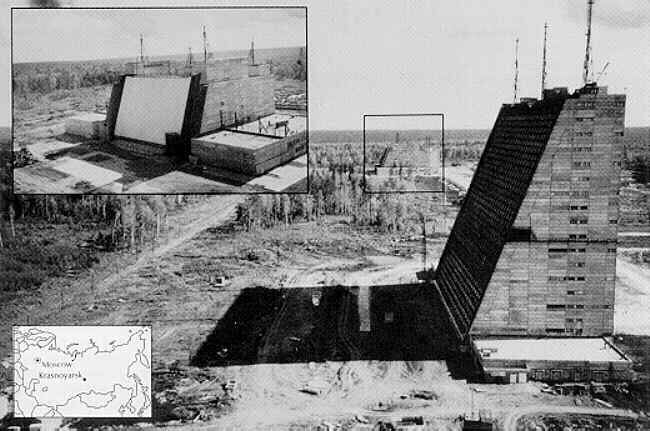 radar Pechora ex URSS. RX ant. 80x80 m. TX ant. 30x40 m.
radar Pechora ex URSS. RX ant. 80x80 m. TX ant. 30x40 m.
e a frequenze ottiche o IR (laser radar). I componenti
e lhardware del radar variano con la frequenza usata e anche le dimensioni
variano molto col tipo di applicazione, la potenza, le prestazioni. Nonostante
ciò il principio applicativo del radar resta lo stesso.
Il radar ha subito un notevole sviluppo negli anni dai 30 ai 40 per far fronte alle necessità militari. Esso è tuttora ampiamente impiegato dalle forze armate e molti avanzamenti nella tecnologia radar si devono allapplicazione militare. Nello stesso tempo, il radar ha trovato un grande numero di applicazioni civili, controllo del traffico aereo, metereologia, navigazione di navi ed aerei, misurazione della velocità per applicazioni industriali e per tutori della legge, sorveglianza dello spazio, e osservazione planetaria.
Un tipico radar opera mediante la radiazione di uno stretto fascio di energia elettromagnetica nello spazio.
Lo stretto fascio è emesso dallantenna per esaminare (to scan) e ricercare una regione dove ci si aspetta di trovare dei bersagli. Quando poi un bersaglio viene illuminato dal fascio, esso intercetta una parte dellenergia radiata e ne riflette indietro una porzione al sistema radar. Siccome la maggior parte dei sistemi radar non trasmettono e ricevono contemporaneamente, può essere usata una singola antenna sulla base della condivisione del tempo di RX e TX.
Un ricevitore collegato allantenna estrae il desiderato segnale riflesso (eco) ed elimina quei segnali che non interessano. Per esempio un segnale interessante può essere leco di un aereo. Segnali non interessanti possono essere gli echi (clutter) del terreno o della pioggia, che possono mascherare ed interferire quelli dellaereo. Un caso particolare sono i radar meteo che invece indagano la pioggia, le formazioni nuvolose e soprattutto sono impiegati per la previsione degli uragani.
Il radar misura la posizione del bersaglio in distanza e posizione angolare o azimut. La distanza è determinata misurando il tempo totale che impiega il segnale del radar per fare il viaggio che lo porta al bersaglio e ritorno. La direzione angolare del bersaglio normalmente corrisponde alla direzione in cui punta lantenna nel momento in cui leco è ricevuto. Attraverso misure di posizione di un bersaglio in istanti succesivi di tempo, può essere determinata la sua traccia (track). Una volta acquisita questa informazione , la posizione del bersaglio in un tempo futuro può essere prevista (estrapolata). In molte applicazioni radar, il bersaglio non si considera "acquisito" (detected) finchè non è stata stabilita una traccia.
Il tipo più comune di segnali radar consiste
in un treno ripetitivo di impulsi di breve durata.
La seguente figura
 Impulsi
Impulsi
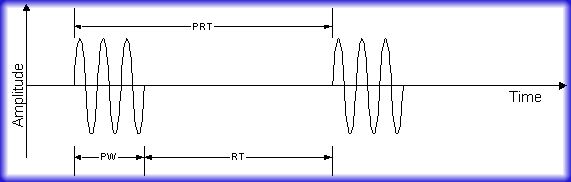
è una semplice rappresentazione di impulso sinusoidale che potrebbe essere generato da un radar a medio raggio destinato al controllo aereo. La forma donda rappresenta la variazione nel tempo della tensione in uscita del TX.
La larghezza dellimpulso (PW) dell esempio è mezzo microsecondo. In questo breve tempo limpulso può però contenere migliaia di cicli.
A 5 Ghz contiene 2500 cicli (5*109(Hz o cicli/sec)*0,5*10-6(s) = 2,5*103 (cicli) . Per una semplice scansione circolare si può determinare il numero di impulsi che torneranno da ogni bersaglio.
(t ) rappresenta il dwell time ossia il tempo che il bersaglio rimane nel fascio del radar durante ogni scansione. t =q/w dove q è la larghezza del fascio e w è la velocità di rotazione in gradi al secondo. Il numero di impulsi a cui il bersaglio è sottoposto durante t è dato da:N = t *PRF. In realtà spesso si fa il calcolo inverso cioè si impone un minimo di impulsi e di conseguenza si ottiene PRF e velocità di rotazione.
Lintervallo (PRT) tra due cicli è dato in un millisecondo, che corrisponde alla frequenza di ripetizione dellimpulso (PRF) di 1 kHz. La potenza dellimpulso ( Pt potenza di picco) è nellesempio 2 MW. Ma siccome il radar a impulsi non emette continuamente , la potenza media è molto inferiore di quella di picco. In questo esempio è 1kW. La potenza media piuttosto che quella di picco dà la misura delle capacità di un sistema radar. I radar hanno potenze che vanno da pochi milliWatt a più MW a seconda delle applicazioni.
Il debole eco di un segnale di un bersaglio può essere meno di 10-12 W (-90 dBm).I livelli di potenza in un sistema radar possono quindi essere molto grandi in TX ed estremamente bassi in RX.
La distanza dal bersaglio è determinata dalla misurazione del tempo che il segnale radar impiega a viaggiare fino al bersaglio e ritorno. Le onde radar viaggiano grossomodo alla stessa velocità della luce 300000 km/s. La distanza (range) r dal bersaglio è dunque cT/2, dove c è la velocità della luce, T il tempo "di viaggio" del segnale misurato dal radar. Dunque ogni microsecondo vale 150m. Per esempio se il tempo misurato dal radar per andata e ritorno dal bersaglio è 500 microsecondi, la distanza dal bersaglio sarà 75 km.
T=5*10-4(s) c=3*108(m/s)
r(m)=3*108*5*10-4/2=7,5*104(m) = 75km
Esiste una distanza minima di visualizzazione corrispondente alla durata dellimpulso. In pratica durante il pur breve tempo di TX non si puo ricevere e quindi gli echi di ritorno non sono rilevabili.
Componenti principali di un sistema radar.
 Componenti
Componenti
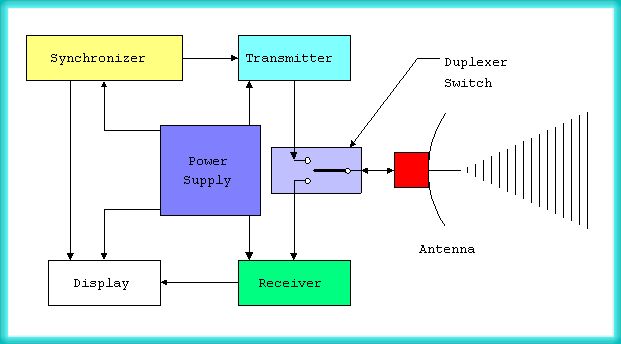
Il TX genera il segnale di alta potenza radiato dallantenna. Esso crea londa radio, la amplifica ad adeguata potenza per provvedere un range adeguato e la modula per formare il treno di impulsi.
La sorgente dellonda portante può essere un Klistron, un TWT (Traveling Wave Tube), un Magnetron o a Stato solido.
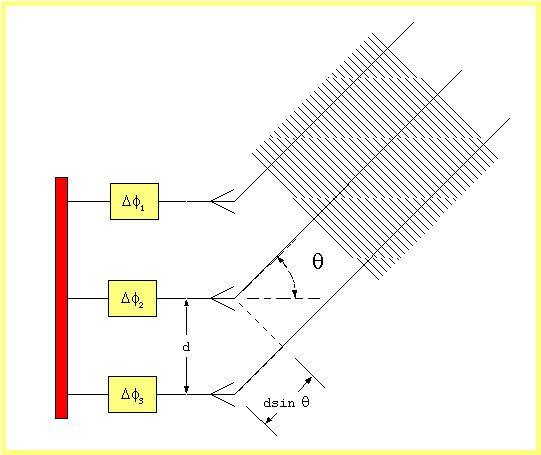
Lantenna ha spesso la forma di un riflettore parabolico, simile come concetto al faro di una torcia elettrica il quale riflette e convoglia in un fascio la luce di una piccola lampadina ma molto differente in costruzione e dimensione. Può anche consistere in una matrice di antenne individuali (dipoli) che operano insieme (phased array antenna).
 Array
Array
Questo tipo di antenna permette anche lorientamento elettronico del fascio, senza che questa sia ruotata meccanicamente, mediante la variazione nella fase di alimentazione dei dipoli dellarray (electronic steer) .
Lantenna agisce come trasduttore per accoppiare lenergia elettromagnetica della linea di trasmissione alla radiazione nello spazio e viceversa. Il duplexer permette la trasmissione e la ricezione alternate dalla stessa antenna. In effetti agisce come un interruttore ad alta velocità che protegge i sensibili stadi di ingresso dell RX dallalta potenza del TX. Il ricevitore seleziona ed amplifica i deboli echi radar cosicchè essi possano essere rappresentati su uno schermo per loperatore umano o essere processati da un computer.
Il signal processor separa i segnali riflessi dal bersaglio da quelli indesiderati (il clutter dalla terra, cielo mare, pioggia ecc.). Questi segnali indesiderati a volte superano per intensità gli echi del bersaglio anche di migliaia di volte. Gli echi di un oggetto stazionario possono essere distinti da quelli di un bersaglio in movimento rilevando lo spostamento nella frequenza del segnale di ritorno delloggetto in movimento (Doppler frequency shift).
Una volta rilevato un bersaglio in distanza ed angolo, può essere formata una traccia misurando la posizione del bersaglio in tempi successivi.
Questa operazione è compiuta automaticamente dal data processor che è in grado di elaborare in tempo reale un grande numero di dati relativi anche a centinaia di bersagli.
Il tipo di forma donda trasmessa e il signal processing del segnale ricevuto possono essere cambiati dalloperatore o funzionare in automatico in relazione al tipo di bersaglio indagato e lambiente operativo. La funzione implementata nel computer del radar di "system control" oltre a quanto descritto, controlla le temporizazioni dei processi in modo che le varie parti funzionali del radar si integrino in modo appropriato.
Informazioni del bersaglio ottenute dal radar.
La precisione in distanza di un impulso radar dipende dalla larghezza (o durata) dellimpulso. Più corto è limpulso, migliore è la precisione. La durata dellimpulso corrisponde con legge inversa alla banda passante. Quindi migliore precisione di misura equivale ad ampia larghezza di banda.
Riducendo la durata dellimpulso si riduce anche la potenza media emessa e quindi la portata del radar, si tende inoltre a far lavorare il radar a potenza media abbastanza costante. E quindi necessario selezionare i parametri più favorevoli. Ci riferiamo ora ad un esempio reale. Esaminiamo la
Tabella Raymarine 11s72
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
fornita dalla Raytheon www.raymarine.com per il radar marino Pathfinder 11s72 da 10kW (potenza di picco) banda S.
 Raymarine11s72
Raymarine11s72
Riferiamoci a 3 parametri di durata impulso; 0.06 m s, 0,45 m s, 1 m s per portate rispettivamente fino a 0,25 km, 5,5km e 133km. La banda passante, come previsto, passa da 12 a 3 MHz e a soli 500 kHz per la massima portata che corrisponde alla maggior durata dell impulso. Il PRF ( Pulse Rate frequency ) frequenza di ripetizione dellimpulso si riduce (3kHz, 1,6 kHz e 0,74 kHz) allaumentare della lunghezza dellimpulso stesso per rientrare nei valori erogabili di potenza media e per rendere misurabili i tempi più lunghi di ritorno delleco. (RT) tempo di riposo è quello durante il quale si ascolta e misura leco di ritorno. Proviamo a controllare, nel caso dellultima misura considerata, che lRT scelto dai sistemisti della Raytheon sia adeguato al range massimo previsto.
PW = 1 m
s,
PRF = 740 Hz.
Calcoliamo RT.
RT = PRT-PW
PRT = 1/PRF = 1/740 = 1,35 *10-3 (sec).
Per cui RT = 1,35 *10-3 1*10-6
PW in questo caso è trascurabile
e si può assumere RT = PRT
applicando la formula della distanza
r=(3*108*1,35*10-3)/2 @
2*10-5m = 200km
Questa temporizzazione rende perciò eseguibili
senza ambiguità le misurazioni che garantiscono, con ampio margine,
il range di acquisizione previsto di 133 km (72 miglia nautiche, 1 miglio
nautico = 1852 m)
L antenna di questo radar misura 1,83 m e non
è dotata di riflettore, si tratta infatti di un array. La potenza
è fornita da un magnetron pilotato da uno stadio allo stato solido.
Ricordo che il Range non ambiguo Ru= c*PRT/2 =
c/2*PRF corrisponde al tempo che intercorre tra due impulsi.
Se il target fosse a una distanza maggiore di
Ru riceveremmo un impulso di ritorno dopo limpulso successivo. Questo
ci darebbe una misura sbagliata molto minore del reale. Esistono comunque
radar volutamente ambigui che risolvono il dato di distanza con sistemi
a variazione di PRT.
Radar ambiguo.
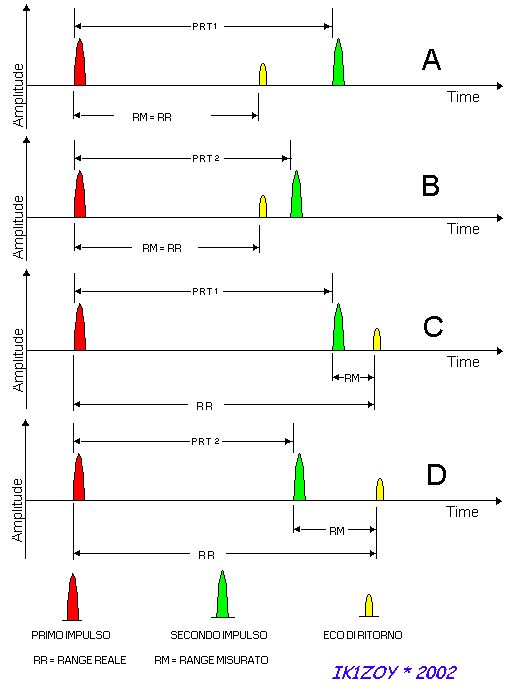
Caso A. Non ambiguo RR<PRT, RM = RR,
Caso B. Non ambiguo. Variando PRT, RM rimane invariato
= RR,
Caso C. Ambiguo. RM diverso da RR.
Caso D. Ambiguo. Variando PRT, RM varia, ci segnala
lambiguità e ci permette di correggerla riferendo la misura allimpulso
precedente.
Vorrei introdurre la formula che determina la portata teorica di un radar.
Rmax =4Ö[(Pt*G*s * Ae)/(4p )2*Smin]
Rmax = Portata teorica massima
Pt = Potenza di picco in uscita
G=guadagno di antenna comprensivo di perdite
s = radar cross section proporzionale alla superficie del bersaglio e al suo coefficiente di riflessione
Ae = Antennas aperture proporzionale allarea dellantenna e comprensiva delle perdite.
Smin = potenza del minimo segnale riconoscibile.
Notiamo che la portata dipende dalla potenza in funzione della radice quarta. Per raddoppiare la portata di un radar che con 250 w raggiunge un range di 50 km dobbiamo impiegare una potenza 16 volte maggiore cioe 4kW per poter discernere un bersaglio a 100km. Mentre con il raddoppio della potenza (500w) non arriveremmo neppure a 60 km.
Labilità nel discernere un segnale ricevuto dal rumore di fondo dipende dal rapporto segnale-rumore (S/N). Il rumore di fondo è specificato da un valore medio, chiamato noise-equivalent-power (NEP). Questo valore equipara direttamente il rumore a un valore in potenza in modo che esso possa essere direttamente confrontato con la potenza del segnale ricevuto. Usando questo sistema il criterio per poter detettare un eco con successo è dato da Pr>(S/N)NEP, dove Pr è la potenza del segnale di ritorno. Siccome questo dato è molto significativo nelle prestazioni del sistema (è al denominatore nella formula della portata), esso è fornito con ununica designazione
Smin, ed è chiamato Minimum Signal for Detection.
Smin = (S/N) NEP (W)
Il valore equivalente in dBm MDS(dBm) = 10 Log (Smin/1 mW)
È chiamato Minimum Discernible Signal.
Lo stealth f117 il famoso aereo fantasma "invisibile" al radar oltre ad altri "trucchi" più o meno segreti come la vernice di cui è ricoperto, ha un s di valore molto basso e riflette quindi pochissima energia. Non ha neppure una superficie tonda o smussata che si possa presentare verso la sorgente di emissione con un angolo riflettente favorevole.
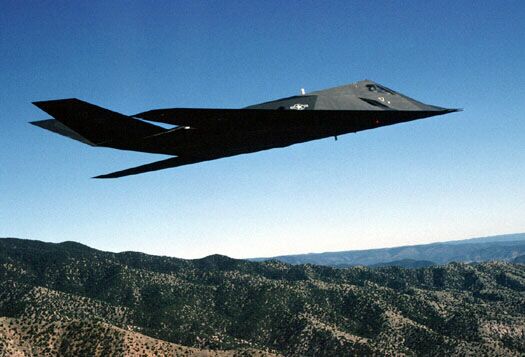 Stealth f117
Stealth f117
Si può notare come il guadagno dantenna sia importante nella funzionalità del radar. Non possono sfuggire le ragguardevoli dimensioni dei radar degli aereoporti.
Analizzando anche solo visivamente queste antenne si possono dedurre dati interessanti sul loro funzionamento.
Il Gdir guadagno direzionale teorico di una antenna è dato da
Gdir=4p /q *f
q è la larghezza orizzontale del fascio e f quella verticale.
La larghezza del fascio dipende dalla dimensione dellantenna( Lo e Lv lunghezza orizzontale e verticale in m) e dalla frequenza operativa ( l lunghezza donda in m).
q = l /Lo f = l /Lv
Osservando una antenna larga circa 8 m e alta 4 e ipotizzando una frequenza di funzionamento di circa 1 GHz,( vedi nota1), proviamo a fare il calcolo del guadagno teorico.
q = 0,3m/8m = 0,0375 radianti =2,15 gradi
f = 0,3m/4m = 0,075 radianti = 4,3 gradi
Gdir = 4p /(0,0375 * 0,075) = 4468 = 36,5 dB (10Log Gdir)
Per ottenere il guadagno reale è necessario introdurre una costante moltiplicativa che ci lascia dedurre un G reale di circa 30 dB.
In internet si possono trovare le caratteristiche del radar militare per la scoperta aerea/navale AN/SPS-49 che è probabilmente simile a quello considerato, che funziona al limite della banda L a 900 MHz e di cui viene dichiarato il guadagno di 28,5 dB.
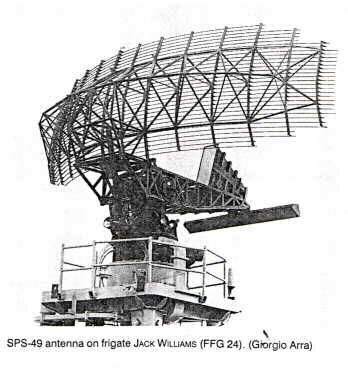 SPS-49
SPS-49 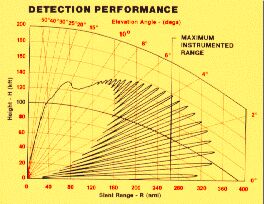 prestazioni SPS-49
prestazioni SPS-49
Con una simile, formidabile antenna 1W input corrisponde
a 708 W irradiati. In realtà AN/SPS-49 lavora con potenza di picco
di 360kW corrispondente a una ERP di 255MW
.
Il concetto di steradianti. Si usa per definire la copertura volumetrica del fascio radar.
Langolo solido misurato in steradianti è definito essere larea del fascio frontale divisa per il range a quadrato.
Un fascio non direzionale coprirebbe un angolo di 4p r2 (superficie della sfera) a una distanza r (il raggio della sfera). In questo caso 4p r2/ r2 = 4p steradianti. 4p steradianti corrispondono quindi alla copertura in tutte le direzioni a una distanza r.
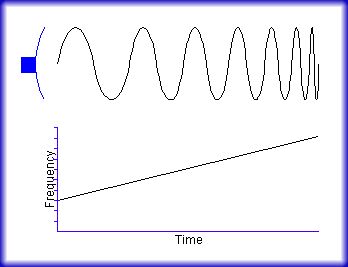
La Compressione dimpulso.
E un metodo che combina la alta energia di un impulso lungo con lalta risoluzione di un impulso corto. Limpulso viene modulato in frequenza, e siccome ogni parte dellimpulso ha differente ed unica frequenza i ritorni possono essere separati da un ricevitore con funzione di PDPC (post-detection pulse compression).
 Compressione
Compressione
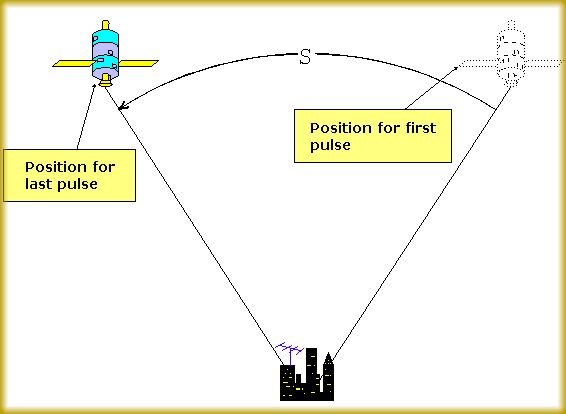
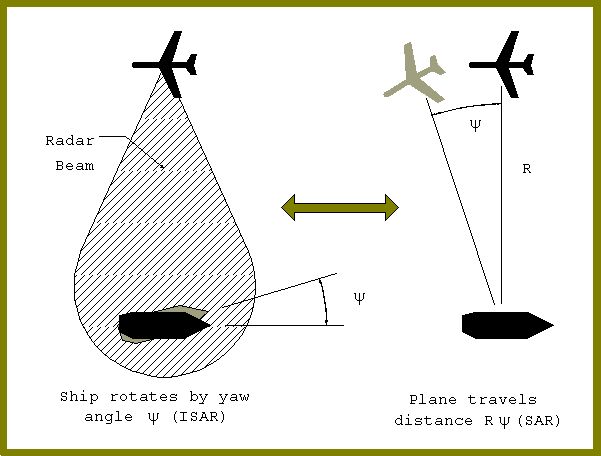
I radar SAR (Synthetic Aperture Radar).
Sono radar che sfruttano il movimento del trasmettitore-ricevitore per simulare una una grande larghezza dellantenna.
 SAR
SAR
 SIR
CX SAR
SIR
CX SAR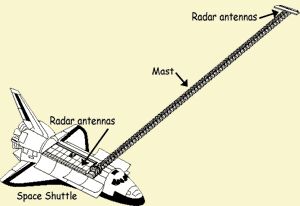
Abbiamo gia visto che la risoluzione angolare è determinata dalla dimensione dellantenna e quindi dalla larghezza del fascio. A una data distanza, R, labilità di risolvere oggetti in una certa direzione (cross range direction) è data da D R = Rq
Che semplificando è la lunghezza darco
spazzolato dallangolo q
alla distanza R. Per esempio un angolo di 5° di larghezza di fascio
(0,087 rad.) sara largo 174 m. a una distanza di 2000m.
Per ottenere una maggiore risoluzione sfruttando
il movimento relativo tra radar e bersaglio, il sistema deve registrare
parecchi ritrorni e successivamente ricostruirli come se fossero simultanei.
Se il movimento relativo radar-bersaglio durante il tempo di raccolta impulsi
è S, allora lapertrura effettiva dopo la ricostruzione degli impulsi
sarà anchessa S.
Questa applicazione è vastamente usata nei satelliti radar per il rilevamento di oggetti e la topografia della terra.
ISAR (Inverse Radar Synthetic Aperture) si basa sullo stesso principio ma a parti invertite con il radar fermo e loggetto del rilevamento che muove o ruota o beccheggia (bersagli navali).
 ISAR
ISAR
I Radar interferometrici misurando anche la fase
del segnale di ritorno ottengono impressionanti prestazioni in risoluzione.Essi
hanno permesso di effettuare dallo spazio rilevamenti geologici dei moti
tettonici, dei ghiacci artici, dei terremoti e una dettagliata mappatura
della terra.
 Tibet
mountains
Tibet
mountains
 Isle
St.Pierre et Miquelon
Isle
St.Pierre et Miquelon
Nota1 Bande di lavoro e
principali applicazioni.
K da12a 40 GHz
Brevi distanze, su aerei ed aereoporti
X da 8 a 12 GHz
Osservazione meteo a lunga distanza, sorveglianza aereoporti
HF da 3 a 30 MHz
Ricerca oltre orizzonte mediante propagazione ionosferica
VHF da 30 a 300 MHz
Ricerca aerea, ricerca spaziale di satelliti e missili.
Testi:
Doppler
Radar and Weather Observations
by Richard J. Doviak, Dusan S. Zrnic
Air
and Spaceborne Radar Systems: An Introduction
by Philippe Lacomme
Introduction to Radar Systems and
Radar
Handbook
by Merrill Ivan Skolnik
@_giancarlo_paparella_2002

