Une autre version du capteur opto déjà présenté sur une des page de ce site, cette version inclut soit une sortie à 3.3v pour des machines pilotées par le GPIO d'un Raspberry (PI3 ou PI4), soit une sortie 5v pour d'autres systèmes. Un cavalier permet de sélectionner la bonne sortie. Les sorties sont volontairement laissées libres, la sortie 5v se fait sur front descendant et commute une masse, ce qui implique coté matériel de commande une pull-up en dur ou soft. La sortie 3.3v elle se fait sur front montant, on choisira une pull-down. Sur LinuxCNC suivant la sortie choisie il y aura évidemment des paramétres à régler coté fichier .HAL de Linuxcnc, déclenchement sur front descendant ou montant.
Schéma Eagle. A noter que mes trois capteurs ont été réalisés avec des fourches cannibalisées sur de vieilles imprimantes de bureau, il est possible que des fourches différentes nécessitent une adaptation du schéma et de l'implantation.

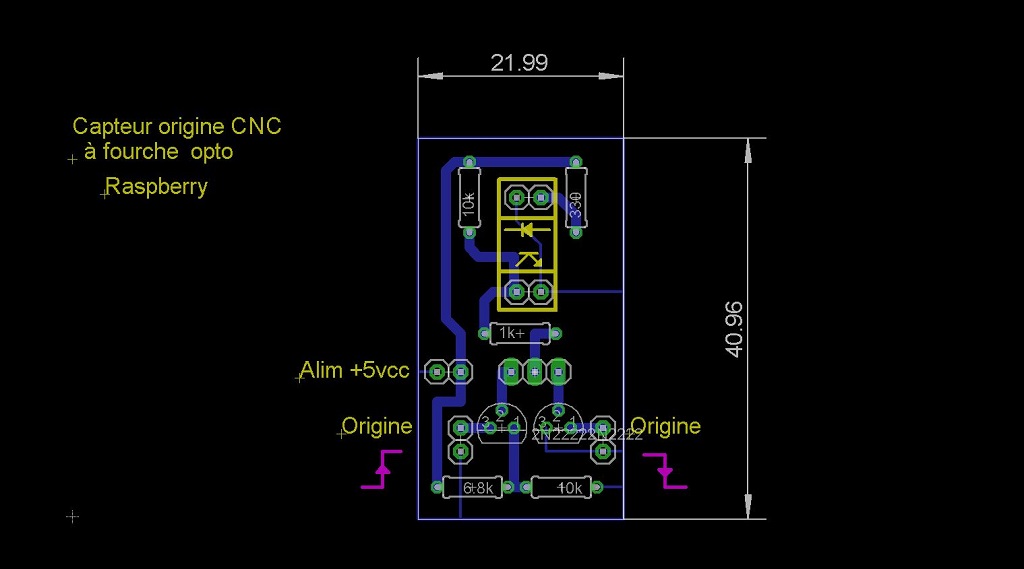
Implantation du PCB