
Pour établir un contact radio en code morse on peut soit répondre à quelqu'un qui lance appel sur la fréquence et engager une conversation, soit lancer des appels
soi-même en attendant que quelqu'un réponde. Il arrive fréquemment qu'on soit obligé de lancer des appels pendant un temps assez long avant d'avoir une réponse.
Cela peut devenir rapidement fastidieux et j'aime bien pouvoir faire autre chose pendant ce temps-là.
Il existe des appareils tout faits pour cela, par exemple un ordinateur ou un microcontrôleur programmé pour cet usage. Il existe aussi des manipulateurs avec des
mémoires ou il est possible d'enregistrer un message. Tout çà est très bien mais j'avais envie de quelque chose d'un peu plus fun pour faire ce travail.
Un manipulateur se manipule soit avec un doigt dans le cas des pioches, soit avec deux doigts pour les double-contacts, les semi-automatiques ou les clés type iambic.
J'ai déjà créé G1LB3RT. pour manipuler les pioches, pour les autres ce sera R0G3R qui se chargera du travail.
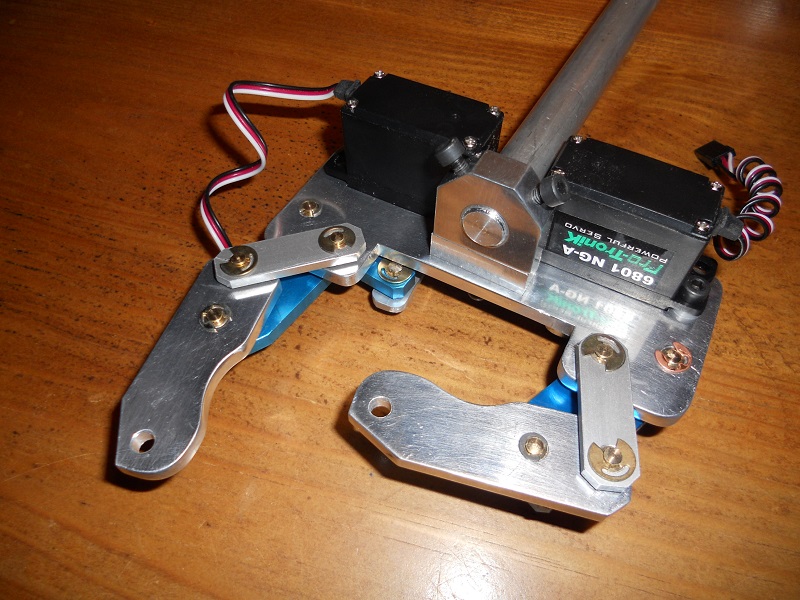
Les plans ont été faits sous Sketchup, toutes les pièces usinées dans de l'alu 6060, il utilise deux servo-moteurs de modélisme pilotés par un arduino. La vitesse
d'éxécution est fortement limitée par la qualité des servo-moteurs bas de gamme, des servos suffisamment rapides étant hors de prix. Pas grave, c'est l'intention qui compte.


ROG3R sait manipuler avec un double-contact. On tape un texte sur le clavier du PC et le programme fait le reste.
Comment faire un CQ automatique pour la station F6FCO.
Sarah Connors a fait ce qu'elle a pu mais R0G3Rminator, imperturbable à continué son job.
Ensuite il a voulu apprendre à se servir d'un manipulateur semi-automatique alors je lui ai prêté le FCOplex, je ne fais pas çà avec tout le monde. Bien sur tout çà est encore un peu lent mais il aussi prendre en compte que R0G3R est un débutant en télégraphie, la prochaine pince utilisera des pistons à electroaimants et devrait être bien plus performante.
