DEDICATED ACARS SERVER SETUP
![]()
If you want to run a rpi as a dedicated ACARS server which
will auto run after the raspberry boots up then considerer using the below script
It’s easy to install and set up the configuration file
- check the below link which explains all you need to know in simple terms
![]()
https://github.com/abcd567a/ad2/blob/master/README.md
As mentioned in the setup instructions the configuration file is bare minimum - you need to customise it to your own requirements
Below is how I did things - open sudo nano /usr/share/ad2/ad2.conf and edit the file
|
|
You will need to create the various folders and populate the with your pictures etc and place everything in a main folder called 'Data' put the basestation and flightroute files directly into the Data folder
Just in case the site is down here is the install script
sudo bash -c "$(wget -O - https://raw.githubusercontent.com/abcd567a/ad2/master/install-ad2.sh)"
![]()
Commands
To see status
sudo systemctl status ad2
To restart
sudo systemctl restart ad2
To stop
sudo systemctl stop ad2
to dis-able temporily
sudo systemctl disable ad2
Help file
./acarsdeco2 --help
Removing installation and all files
sudo rm /lib/systemd/system/ad2.service
sudo rm -rf /usr/share/ad2
If you have a problem pulling information across from virtual radar server ( lots of people do, including me ) especially the plane photos then you can just dispense with the vrs side of things and just pull photos/logos/silhouettes from your 'data' folder, you will loose the routing but at least have the pictures, if that's more important for you.
Replace
--vrs-url http://192.168.1.19:8686
With
--/home/pi/data/pictures
![]()
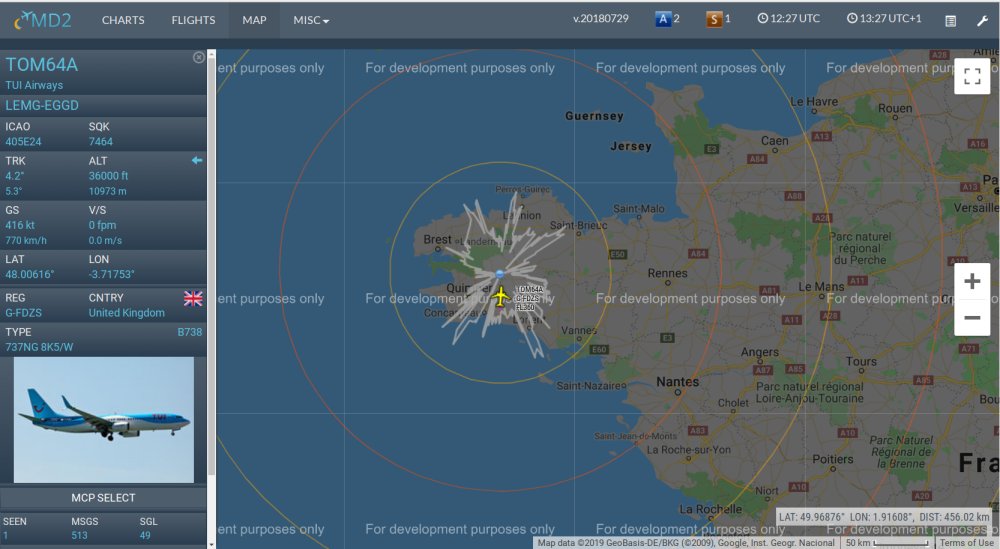
MODESDECO2 - RUNS ON RASPBERRY
PI BOOT
|
INSTALLATION
--- SEE https://github.com/abcd567a/md2/blob/master/README.md
FOR FULL DETAILS
NOTE : GOOGLE MAPS REQUIRES A KEY |
![]()
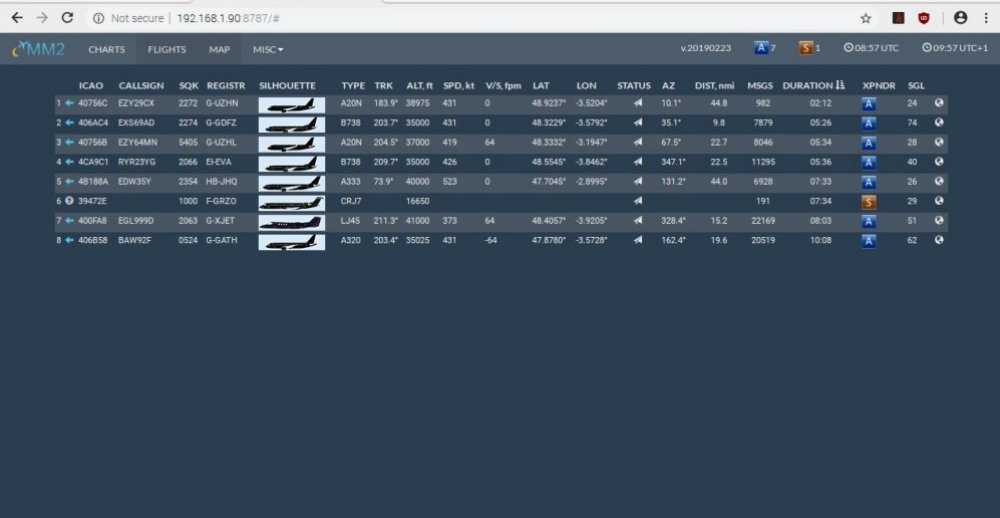
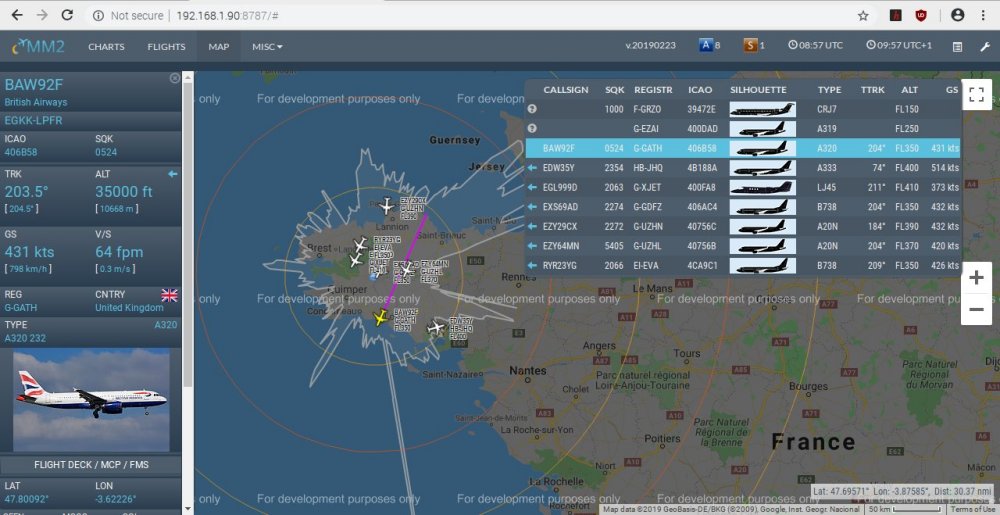
modesmixer - not a decoder - 'mixes' output from other raspberry pi running on your network - runs on boot
https://github.com/abcd567a/mm2/blob/master/README.md
sudo bash -c "$(wget -O - https://raw.githubusercontent.com/abcd567a/mm2/master/install-mm2.sh)"
The config file needs configuring to your requirements i.e
|
--inConnectId
192.168.1.23:30005:23 --inConnectId
192.168.1.52:30005:52 --inConnectId
192.168.1.15:30005:15 --inConnectId
192.168.1.99:30005:99 --inConnectId
192.168.1.30:30005:30 --inConnectId 192.168.1.12:30005:12 --inConnectId
192.168.1.210:30005:210 --inConnectId
192.168.1.204:30005:204 --inConnectId
192.168.1.200:30005:200 --inConnectId
192.168.1.90:30005:90 --inConnectId
192.168.1.222:30005:222 --inConnectId
192.168.1.10:30005:10 --location 48.1900:-003.7200 --localtime --db /home/pi/data/basestation.sqb --frdb
/home/pi/data/flightroute.sqb --silhouettes /home/pi/data/silhouettes --pictures /home/pi/data/pictures --web 8787 --log-file logs |
As mode mixer has no decoder and therefore no sdr dongle it can be installed on
a raspberry pi that is running fr24/pfc/fa etc without interfering with those
programs - whereas acarsdeco2 and modesdeco2 will have to run on dedicated pi's
or use two dongles.
![]()
It may be a good idea for the raspberry pi to be rebooted periodically
http://www.vk3erw.com/index.php/16-software/58-raspberry-pi-how-to-periodic-reboot-via-cron
![]()
![]()